デンマークの風力発電所で、無人航空機を使って風力タービンの後方乱気流を測定。

背景
デンマークのオールボー大学では、無人航空機を使って洋上風力発電機の予備部品を、サービス港から風力タービンのナセルまで直接輸送する研究プロジェクトを進めています。 もし成功すれば、船で部品を運び、クレーンでナセルまで部品を運ぶという、時間と手間のかかる作業を置き換えることができます。 目的は、費用と風力タービン稼働の中断を大幅に減らすことです。
風力タービンは風の強い場所に設置されることが多く、また、予備部品の配送は風力タービンを止めずに行うことが理想とされているため、多くの課題があります。 オールボー大学は、強く乱れた風でも翼が回転を続けている間に、ナセルの真上でドローンを操作する安全性の評価をFTに依頼しました。
プロジェクト
無人航空機がいる場所の風の状態を把握するために、オールボー大学は、FT742-SMセンサーを入手し、まず「小型」ドローンであるDJI Matrice 600に搭載し、その後、研究プロジェクトで試験配送を行う機体である90kgの回転翼ドローンに搭載しました。
M600ドローンが最初に使われた理由は二つあります。 当初、高さ100mの6MWの風力タービンのナセルの上数メートルで、風速20m/sを超える回転翼の後ろ5メートルの位置でホバリングすると、何が起こるのか正確にはわかりませんでした。 そこで研究者たちは、比較的安価なドローンを使うことにしました。 第二に、マルチローター構成により、風センサーを、風況測定に影響を与えるであろう回転翼の後方乱気流の上に設置できました。 長さ50cmのアルミ棒にセンサーを設置し、徐々にナセルに近づけて結果を確認しました。
動画には以下が示されています:
左上:ドローンの高度。
右上:ドローンの前/後モーターと左/右モーターの動作の違い。
左下:FT742-SMで計測された風速(m/s)(青)と風向(紫)。 赤は地上での風速を示していますが、このフライトではこのデータは失われています。
右下:公称磁界(水平方向の破線)に対する磁界強度。
このフライトで最も興味深いのは、ビデオの7分から9分にかけての部分です。 風速の急激な変化により、ドローンの前を通過する風力タービン翼の影が映し出されます。
その後、風速計FT742-SMをT50航空機に移し、胴体の下に逆さまにして取り付けました。 この位置でセンサーが有用なデータを生成できることを確認するために、風の状態を変えて何度も飛行させました。

以下のグラフは、地上での平均風速が約8m/sという、かなり強い風の中を飛行したときのデータです。 風速計がどこまで周囲の風を測定しているのか、航空機の回転翼から乱気流だけを測定しているのか判断するのが難しいため、機体をホバリング(位置を維持すること)させ、方位を何度も変更しました。 測定した風向が比較的安定していて、航空機の方位と相関していれば、測定した風速も信頼できる可能性が高くなります。 左のグラフは、FTセンサーで計測した風向と、航空機のコンパス方位を比較したものです。 右のグラフは、それに伴う測定した風速です。 事実、相関関係が非常に近いことから、風速の測定値もかなり正確であると考えられます。 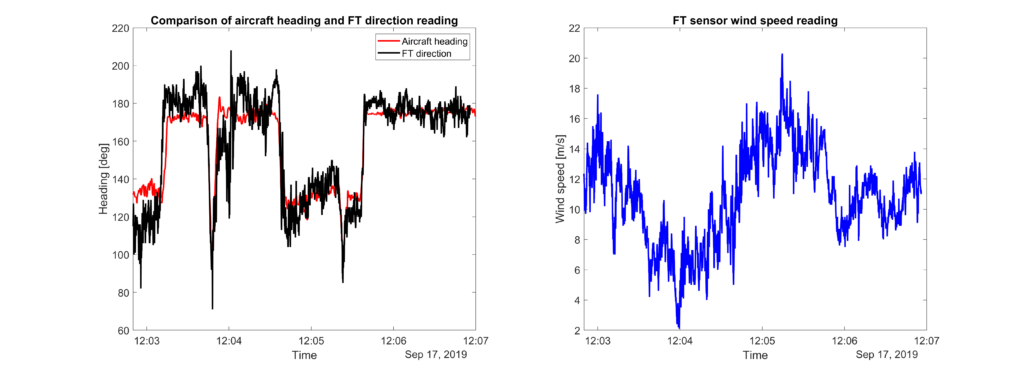
下の動画は、地上の追跡カメラから見たフライトの様子です。 上のグラフに表示されているデータは、動画の4:07から始まっています。 グラフの12.03.50で大きく方向が変わるのは、動画の5:05からです。
結論
「FT742-SMは、大型の無人航空機の下に位置する場合も含めて、風況測定に有用であることがわかりました。 今後のフライトでも、風速と風向を判断するためにこのセンサーを使用する予定です。特に、強風下での運用で航空機の仕様を超えないようにするため、目視外の長距離フライトでの使用を考えています。」
Anders la Cour-Harbo
准教授、数学修士、博士 ドローン研究室マネージャー
オールボー大学(AAU)
デンマーク